
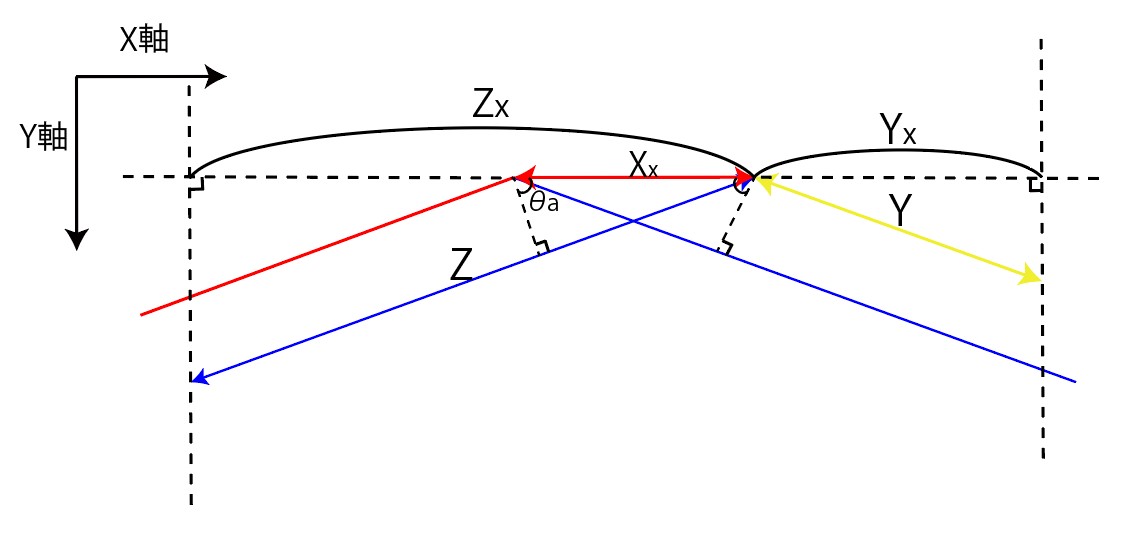
θa:Z軸平行からジョイントを見た際、XY平面に投影されるθの角度(直線Zの垂線とXZ平面のなす角)
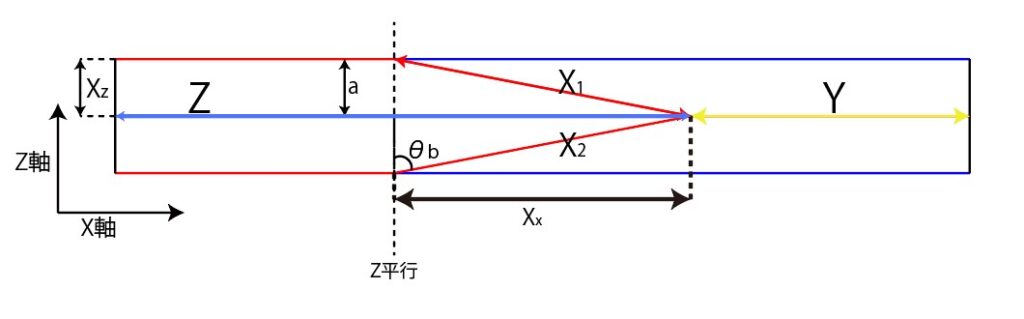
θb:Y軸平行からジョイントを見た際、直線XとZ軸平行の補助線が作る角
を定義しましたが、これらはそれぞれ定義が異なるため、Z軸平行時とY軸平行の関連性が薄いです。
また、それぞれが変域を持っているうえに、互いの角度が関連性を持っているため、扱いが容易ではありません。一応、変域ですが
θ≦θa≦90°
θ≦θb≦90°
このような形になりました。
θbが90°の時は完全に折り切った状態、θaが90°の時は逆に折っていない状態です。
もくじ
X軸平行
まだ観察していなかった方向でX軸平行があります。Zから隣の山折りま出を最短で結ぶ直線とジョイント部山折り(X)のなす角をYZ平面へ投影した物をθcとします。
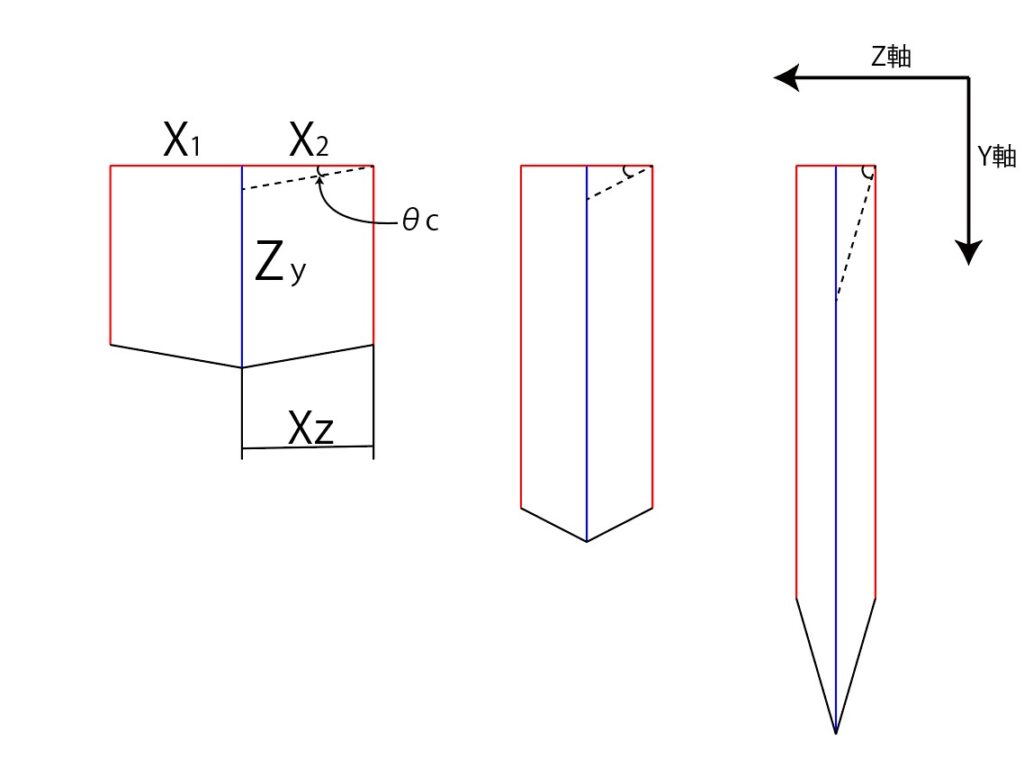
図のような形となります。
ひらめき
これらの図を見てあることを思いました。
ピッチについて言及していないなと。ピッチはいろんな動きがあって、考えるのが複雑だなと思っていたので考えずにいましたが、逆に今X,Y,Zそれぞれの軸平行に見ても動いているというのが利点である気がしました。Z軸平行時のaをAa、X軸平行時のaをAb、Y軸平行時のaをAcとし、それぞれを求めてみます。
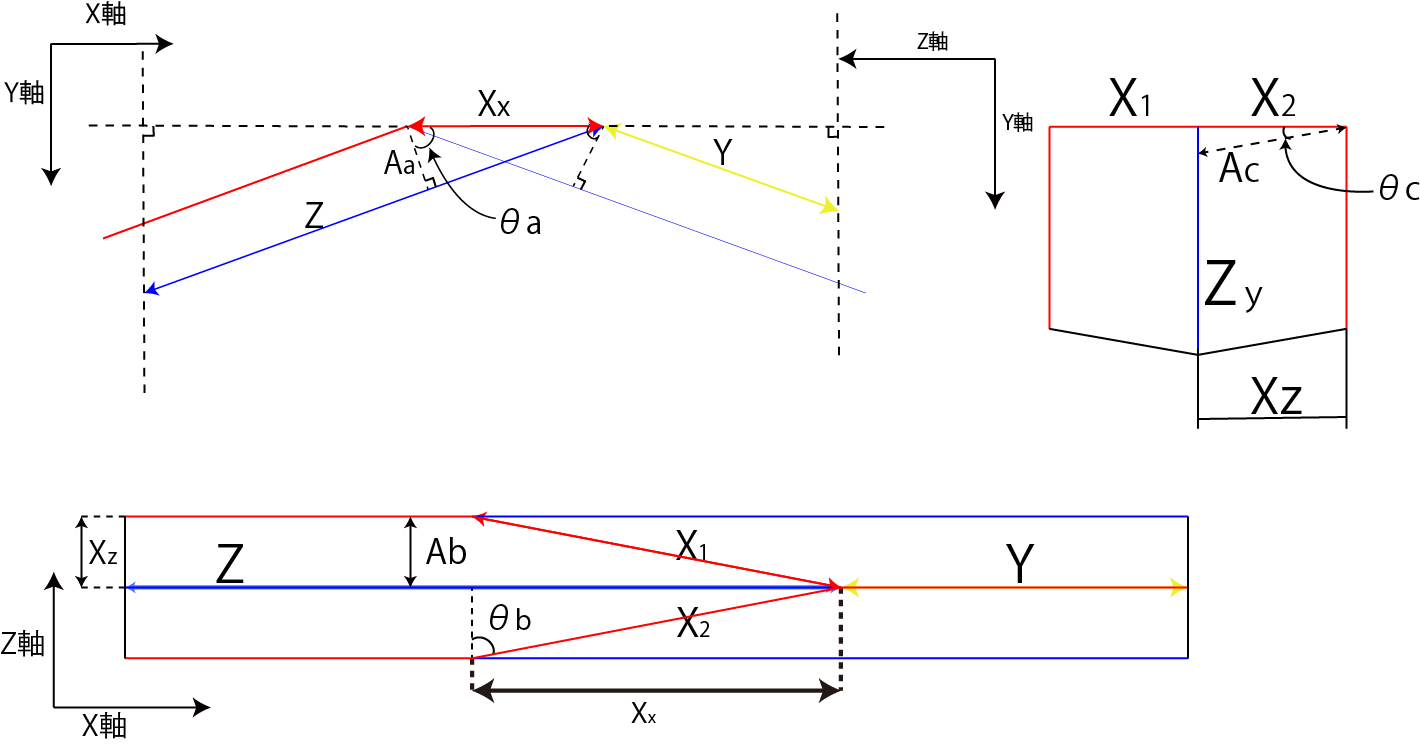
その場合
Aa=Xx・cosθa
Ab=Xcosθb
Ac=Xz/(cosθc )
これらを使用しaのx,y,zの要素を取り出せばaのベクトルが求められそうだ。
要素分解
x要素
x要素はZ軸平行をもとに導くことにする。
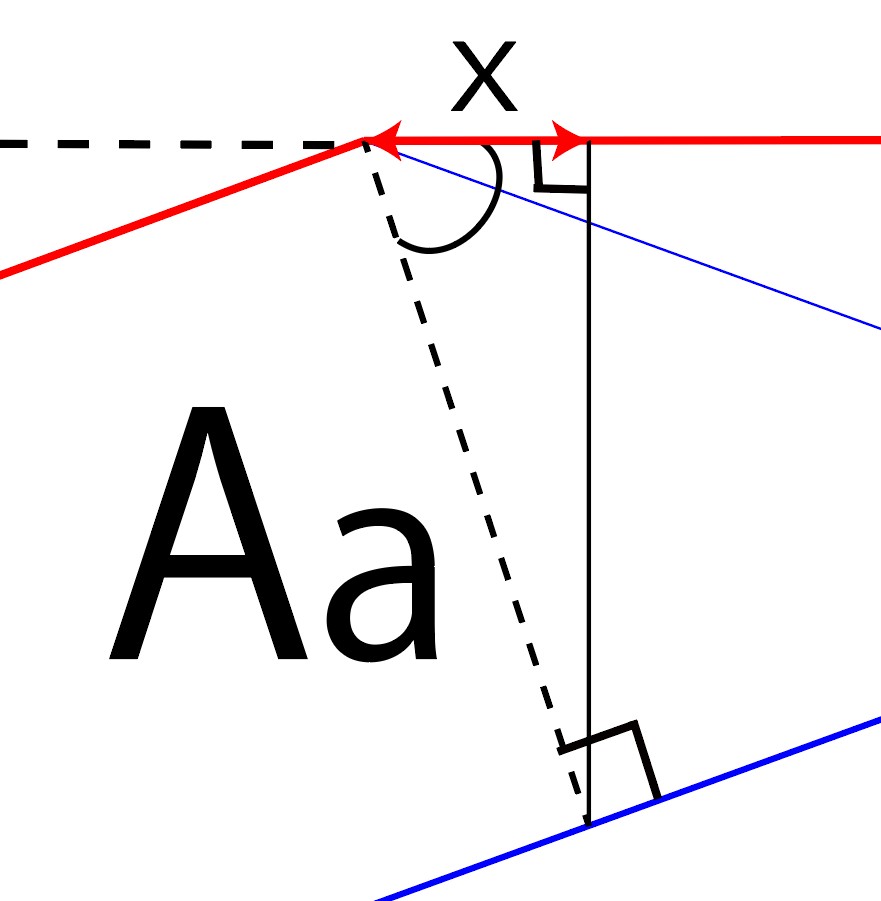
補助線を一本引く(図の黒実線)
そうするとxはAaを用いて表すと
x=Aa・cosθa
y要素
y要素はX軸平行を用いて導く
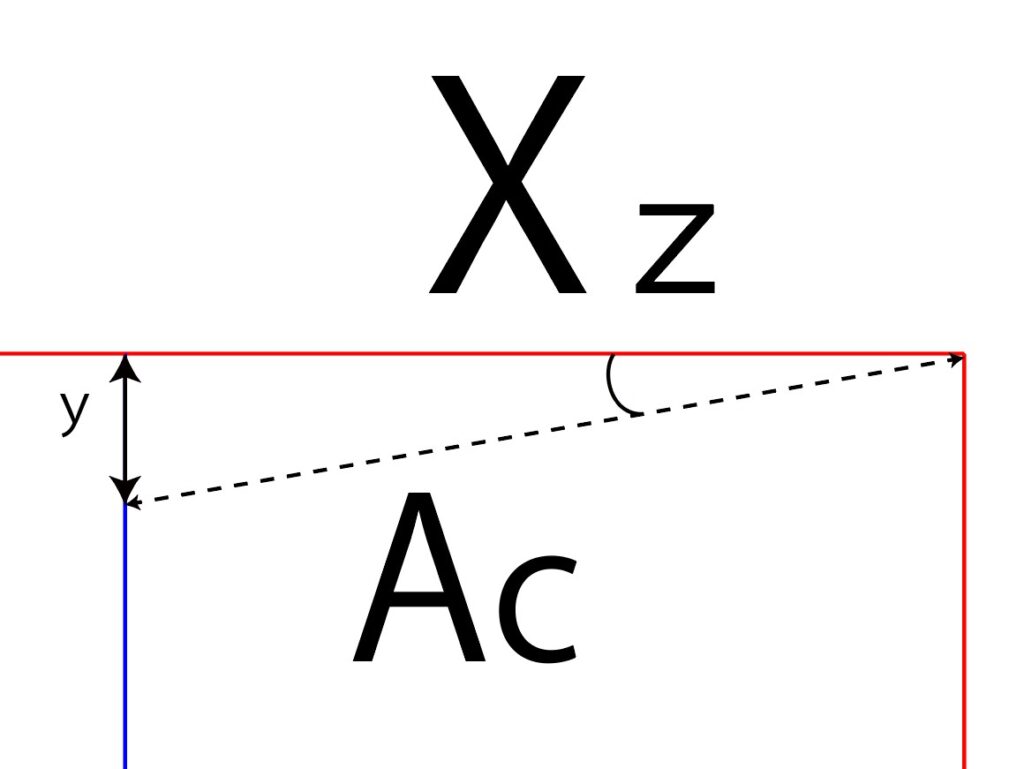
Acで求めるよりもXzを使った方が簡単そうだったのでXzを使い書き表してみました。
y=Xz・tanθc
z要素
z要素はY軸平行で求めます。というかXzやAbがそのままz要素ですね
z=Ab=Xz=Xcosθb
ベクトルの大きさを求める
大きさを求める際は公式があるのでそれを使用します。
a=
Aa=Xx・cosθa を代入
a=
Xx=Xsinθb を代入
a=
Xz=Xcosθb を代入
a=
a=
a=
この時θaとθcは密接に関係している。
むしろθbのみ概念が異なるのだ。θa、θcは谷折りZから山折りまでの最短距離をもとに作られたθをもとに作られたものであるのに対し、θbはZ方向に平行な線を描きその直線と直線Xの間にできる角である。
すなわちこれらの密接に関係した、θa、θcを紐解くことがカギである。
θaの働き
折る前はすべてYが0、XY平面上にあります。折るにつれて、Y方向に移動するのを表すための角度です。
θcの働き
Y成分とZ成分の減少を表現するための角度です。
どちらもY方向に対して関係しています。そのためy要素を抽出することで、θa、θbの関係が出せそうです。
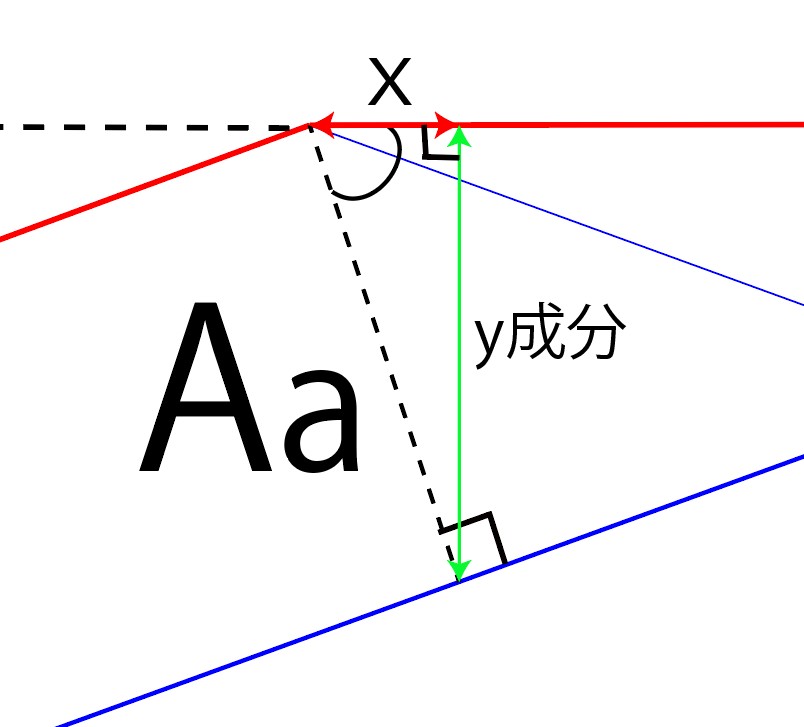

Aa、Acを求めた際の図形を用います。
y=Aa・sinθa
y=Xz・tanθc
Aa・sinθa=Xz・tanθc
Aa=Xx・cosθa を代入
Xx・sinθa・cosθa=Xz・tanθc
Xx=Xsinθb 、 Xz=Xcosθb をそれぞれ代入
Xsinθb・sinθa・cosθa=Xcosθb・tanθc 両辺からXを割る
sinθb・sinθa・cosθa=cosθb・tanθc
tanθc=sinθa・cosθa・sinθb/cosθb
tanθc=sinθa・cosθa・tanθb
a=
先ほど導いた式にtanθc=sinθa・cosθa・tanθb を代入する
a=
a=
すなわち
a=
a=
a=
a= より
a= より
a=
a=
ビンゴ!
aの要素を導くことで結果的にθの関係を導くことができ、その上すっきりとした式を入手することができました。
これでθa、θbの大きさを決めてから長さを導いたりすることができました。
作図へもう一歩
作図へつなげるなら、θa、θbの時のジョイント角θを求めることができれば、
平面⇔立体が可能になります!
今回の初目に求めました。θa=90°の時、図形はXY平面と平行になります。
なのでθ=θbになります。
a=
a=
a=
一応θ=の式は作りましたが最初のa=を使用してもよいと思います。
まとめ
今回は前回求め切れなかった、θa、θbの関係やX軸平行視点での変化さらにそれらお用いて、屈折蛇腹のワンセットを作図可能になりました。すごくうれしいです。
今回求めた式のおさらいをしましょう。
a=
tanθc=sinθa・cosθa・tanθb
a=
a=
続々とメンバーがそろってきました。
※ 本記事では Origami Simulator を使用しています。 Copyright (c) 2018 Amanda Ghassaei Released under the MIT License https://github.com/amandaghassaei/OrigamiSimulator
今後の投稿でもOrigami Simulatorはどんどん使っていく予定ですそのためフッダ―にクレジッドを記載しております